
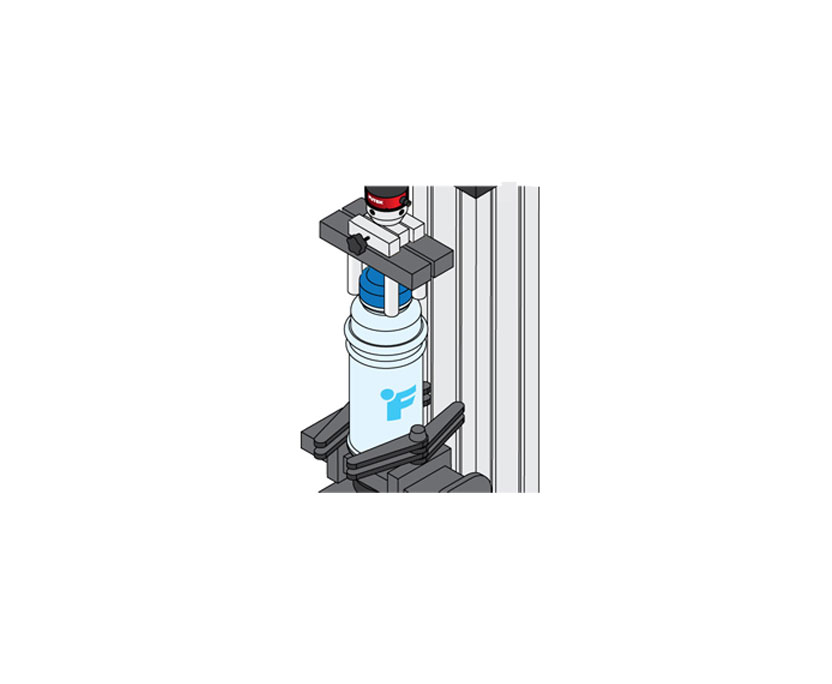
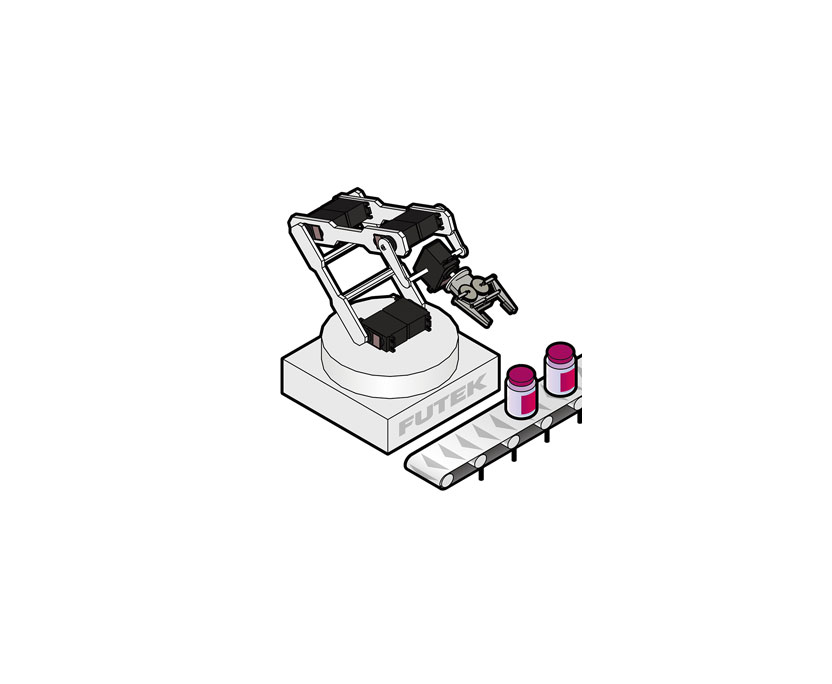
1、6 轴力传感器安装在其中一个机器人的手腕上(最终效应器前的最后一个接头)。
2、6 轴力传感器捕获手臂运动过程中输出的力和扭矩,然后由 USB 系列、IDA100 放大器或 QIA 多通道 SPI 数字输出放大器对传感器输出信号进行调理、放大和数字化。
3、然后将信号发送到 PLC、 PC 或机械臂控制器,提供高精度力 /扭矩反馈。
4、此外,通过 IDA100,可以监控传感器的放大输出,并可通过 FUTEK 的 SENSIT ™软件对模拟放大器设置进行数字化调整。

产品使用
重量轻、精度高的 QMA142 定制 6 轴力/ ,与以下信号调节器之一配对:
QIA125 - 3 通道低功耗 SPI 数字输出放大器;QIA131 - 6 通道高分辨率 SPI 数字输出放大器;USB 系列数据采集模块;IAA 系列模拟输出放大器。
|
QMA142 六轴力传感器 |
|
QLA414 纳米力传感器 |
|
QIA131 高分辨率6通道SPI输出 |
|
QIA125 数字低功耗三通道SPI输出 |
|
IDA100 数字放大器 |

 电话
400-870-9643
电话
400-870-9643
 邮箱
sales@omgl.com.cn
邮箱
sales@omgl.com.cn

 医疗与制药
医疗与制药
 机器人和系统集成商
机器人和系统集成商
 汽车
汽车
 制造业
制造业
 农业
农业



